
Diseño de un algoritmo de control predictivo ajustado por algoritmo evolutivo aplicado a un proceso de nivel de un tanque cónico no lineal
Barra lateral del artículo
Contenido principal del artículo
Resumen
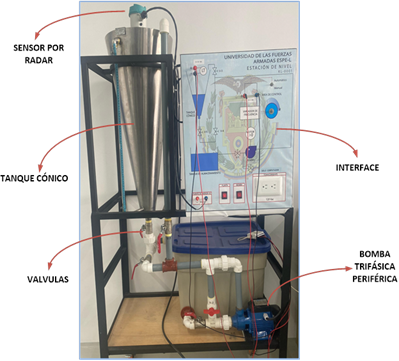
El control de sistemas dinámicos no lineales, como el nivel de líquido en un tanque cónico, representa un desafío crítico en diversas aplicaciones militares, en particular para el manejo de líquidos y lodos pesados. Este artículo presenta el diseño de un algoritmo de Control Predictivo Basado en Modelos (MPC) que utiliza Optimización por Enjambre de Partículas (PSO) y Mínimos Cuadrados (LS) para controlar el nivel de un líquido en un tanque cónico. Se construyó un prototipo en un laboratorio de la Universidad de las Fuerzas Armadas (ESPE). La investigación destaca las limitaciones de los métodos de control tradicionales, que no logran una respuesta transitoria rápida y a menudo causan sobre impulsos, ante a este problema se plantea la incorporación de algoritmos evolutivos ajustados para un control MPC con el objetivo de mejorar el desempeño del control para sistemas no lineales.
##plugins.themes.bootstrap3.displayStats.downloads##
Detalles del artículo
Sección

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Referencias
[1] G. Saravanakumar, S. Dinesh, S. Preteep, P. Sridhar, y others, "Controller tuning method for non-linear conical tank system", Asian Journal of Applied Science and Technology (AJAST), vol. 1, n.o 2, pp. 224-228, 2017.
[2] F. T. Cruz, R. D. Fernandez, A. G. Guizado, y J. F. Zorrilla, "A comparison of Gain Scheduling PID and μ-Synthesis Robust Level Control for a Conical Tank System", en 2021 IEEE XXVIII International Conference on Electronics, Electrical Engineering and Computing (INTERCON), 2021, pp. 1-4.
[3] C. Jauregui, M. D. Mermoud, G. Lefranc, R. Orostica, J. C. T. Torres, y O. Beytia, "Conical tank level control with fractional PID", IEEE Latin America Transactions, vol. 14, no. 6, pp. 2598-2604, 2016.
[4] C. Priya y P. Lakshmi, "Fractional order controller design and particle swarm optimization applied to a nonlinear system", en 2011 International Conference on Recent Trends in Information Technology (ICRTIT), 2011, pp. 959-964.
[5] D. Mercy y S. Girirajkumar, "An algorithmic approach based PS0-PID tuning of a real time conical tank process used in waste water treatment", en International Conference on Computing Methodologies and Communication (ICCMC), 2017, pp. 871-876.
[6] S. E. Berrones Asqui, R. M. Barcia Macías, O. M. Escrig, y J. A. Romero Pérez, "Sintonización de controladores PID para control de velocidad de motores de corriente continua mediante algoritmos genéticos.", 2019.
[7] V. Ravi y T. Thyagarajan, "Application of adaptive control technique to interacting Non Linear Systems", en 2011 3rd International Conference on Electronics Computer Technology, 2011, pp. 386-392.
[8] V. Aparna, M. Hussain, D. N. Jamal, y M. M. Shajahan, "Implementation of gain scheduling multiloop PI controller using optimization algorithms for a dual interacting conical tank process", en 2nd International Conference on Trends in Electronics and Informatics (ICOEI), 2018, pp. 598-603.
[9] M. A. George, D. V. Kamath, y I. Thirunavukkarasu, "An Optimized Fractional-Order PID (FOPID) Controller for a Non-Linear Conical Tank Level Process", en IEEE Applied Signal Processing Conference (ASPCON), 2020, pp. 134-138.
[10] R. Valarmathi, P. Theerthagiri, y S. Rakeshkumar, "Design and analysis of genetic algorithm based controllers for non linear liquid tank system", en IEEE-international conference on advances in engineering, science and management (ICAESM-2012), 2012, pp. 616-620.
[11] V. Ravi, T. Thyagarajan, y M. M. Darshini, "A multiple model adaptive control strategy for model predictive controller for interacting non linear systems", en International Conference on Process Automation, Control and Computing, 2011, pp. 1-8.
[12] K. Montaluisa, L. Vargas, J. Llanos, y P. Velasco, "Model Predictive Control for Level Control of a Conical Tank", Processes, vol. 12, n.o 8, p. 1702, 2024.
[13] T. Madhubala, M. Boopathy, J. S. Chandra, y T. Radhakrishnan, "Development and tuning of fuzzy controller for a conical level system", en International Conference on Intelligent Sensing and Information Processing, 2004, pp. 450-455.
[14] K. Montaluisa, L. Vargas, J. Llanos, y C. Chaquinga, "Intelligent Control Algorithm Based on Fuzzy Logic for Level Control of a Conical Tank", en IEEE Eighth Ecuador Technical Chapters Meeting (ETCM),2024, pp. 1-5.
[15] J. B. D. C. Neto y O. M. Almeida, "Interval Type-2 Fuzzy Logic PID Controller Based on Phase and Margins Gains of the System Applied to a Non-Linear Control of a Conical Tank", en 14th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), 2022, pp. 171-176.
[16] G. Tamilselvan y P. Aarthy, "Online tuning of fuzzy logic controller using Kalman algorithm for conical tank system", Journal of applied research and technology, vol. 15, n.o 5, pp. 492-503, 2017.
[17] D. S. Aarti y N. Arun, "Liquid level control of quadruple conical tank system using linear PI and fuzzy PI controllers", en 2nd International Conference for Emerging Technology (INCET), 2021, pp. 1-5.
[18] V. Ravi, T. Thyagarajan, y S. Y. Priyadharshni, "Gain scheduling adaptive model predictive controller for two conical tank interacting level system", en Third International Conference on Computing, Communication and Networking Technologies (ICCCNT’12), 2012, pp. 1-7.
[19] M. A. Duarte-Mermoud y F. Milla, "Model predictive power stabilizer optimized by PSO", en IEEE International Conference on Automatica (ICA-ACCA), 2016, pp. 1-7.
[20] H. B. Novin y H. Ghadiri, "Particle swarm optimization base explicit model predictive controller for limiting shaft torque", en 5th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), 2017, pp. 35-40.
[21] Z. Cai, "Application of PSO Algorithm in Optimizing BP Neural Network", en IEEE 2nd International Conference on Control, Electronics and Computer Technology (ICCECT), 2024, pp. 853-859.
[22] L. Shi, X. Tang, y J. Lv, "PCA-based PSO-BP neural network optimization algorithm", en The 27th Chinese Control and Decision Conference (2015 CCDC), 2015, pp. 1720-1725.
[23] R. P. Borase, D. Maghade, S. Sondkar, y S. Pawar, "A review of PID control, tuning methods and applications", International Journal of Dynamics and Control, vol. 9, pp. 818-827, 2021.
[24] J. Kennedy y R. Eberhart, "Particle swarm optimization", en Proceedings of ICNN’95-international conference on neural networks, 1995, pp. 1942-1948.