
Implementación de controladores por realimentación de estados y controlador PID aplicado a un motor de DC con dos masas mediante dSPACE
Barra lateral del artículo
Publicado:
2017-11-17
Palabras clave:
Controlador con realimentación de estados, motor de DC, Control proporcional integral derivativo
Contenido principal del artículo
Resumen
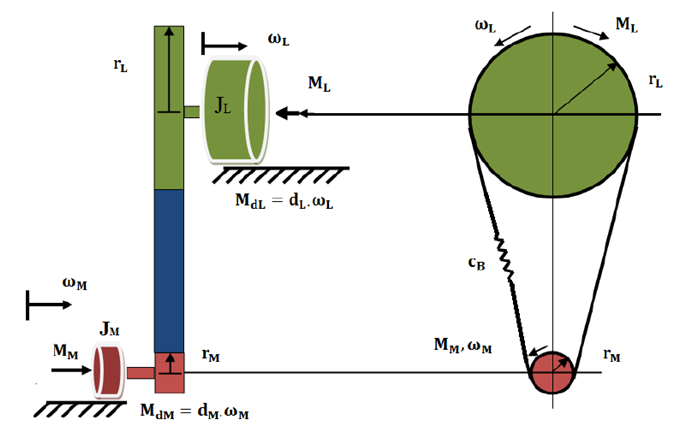
Este artículo presenta el diseño e implementación de dos controladores con realimentación de estados y un controlador proporcional integral derivativo PID aplicados sobre un motor de DC que tiene acoplado una masa a su eje y una segunda masa conectada mediante una banda. La variable a controlar es la posición angular del motor de DC. Este artículo resume el diseño, implementación y pruebas de funcionamiento de tres controladores implementados y probados en el mismo hardware, pero con requerimientos diferentes para la amplitud de la posición angular del motor de DC. Las pruebas de funcionamiento de los controladores han sido realizadas sobre el motor físico con dos masas y sobre el modelo matemático del sistema electromecánico, lo que permite tener una comparación del controlador al operar sobre el hardware y sobre el sistema simulado. Cada controlador ha sido diseñado para obtener el menor tiempo de establecimiento de la respuesta a la función escalón.
##plugins.themes.bootstrap3.displayStats.downloads##
##plugins.themes.bootstrap3.displayStats.noStats##
Detalles del artículo
Número
Sección
ARTÍCULOS TÉCNICOS

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Implementación de controladores por realimentación de estados y controlador PID aplicado a un motor de DC con dos masas mediante dSPACE. (2017). MASKAY, 7(1), 22-30. https://doi.org/10.24133/maskay.v7i1.340