
Desempeño de algoritmos gusano en la navegación de una plataforma robótica móvil
Barra lateral del artículo
Contenido principal del artículo
Resumen
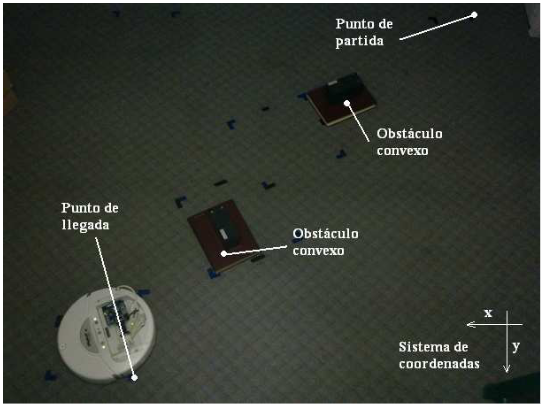
El presente trabajo presenta la implementación de algoritmos de navegación denominados gusano 1 y gusano 2 sobre la plataforma robótica móvil de iRobot Create, los cuales se brindaron la capacidad de autonomía para navegar dentro de entornos desconocidos. Además, se utilizaron los módulos de radio frecuencia, que funcionan bajo el estándar ZigBee, para dotar de comunicación inalámbrica entre el robot y una PC. Se realizaron pruebas de comunicación para determinar la máxima distancia de trabajo a la que pueden funcionar los módulos RF en interiores; mientras que, para el análisis de desempeño de los algoritmos básicos de navegación montados sobre la plataforma robótica móvil se definieron tres escenarios diferentes donde se verificó la certeza de haber alcanzado la meta por el robot.
##plugins.themes.bootstrap3.displayStats.downloads##
Detalles del artículo
Número
Sección

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.