
State-space feedback controllers and PID controller implementation for a DC motor with two masses using dSPACE
Article Sidebar
Main Article Content
Abstract
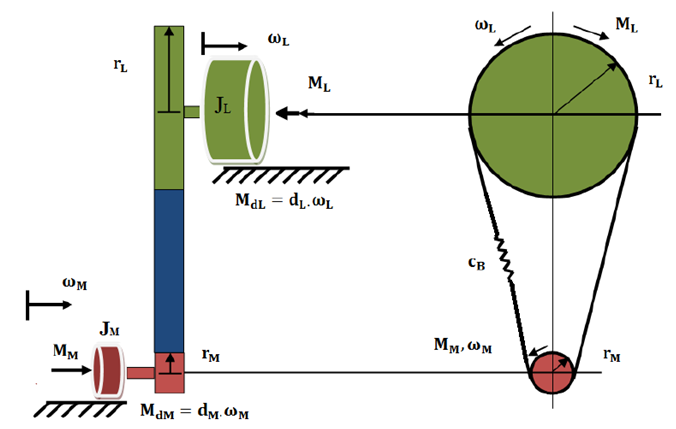
This article presents the design and implementation of two state feedback controllers, and a proportional integral derivative controller PID is applied to a DC motor with a coupled mass on its axis and a second mass connected by a band. The variable to be controlled is the angular position of the DC motor. This article summarizes the design, implementation, and functional tests of three controllers, which have been implemented and tested on the same hardware but with different requirements for the angular position amplitude of the DC motor. The controllers' operation tests have been made on the physical motor with two masses and on the mathematical model of the electromechanical system, which allows a comparison of the controller running on the hardware and the simulated system. Each controller has been designed to obtain the shortest settling time for the step function response.
Downloads
Article Details
Section

This work is licensed under a Creative Commons Attribution 4.0 International License.
Authors who publish in this journal agree to the following terms: Authors retain the copyright and guarantee the journal the right to be the first publication of the work, as well as, licensed under a Creative Commons Attribution License that allows others share the work with an acknowledgment of the authorship of the work and the initial publication in this journal. Authors may separately establish additional agreements for the non-exclusive distribution of the version of the work published in the journal (for example, placing it in an institutional repository or publishing it in a book), with acknowledgment of its initial publication in this journal. Authors are allowed and encouraged to disseminate their work electronically (for example, in institutional repositories or on their own website) before and during the submission process, as it may lead to productive exchanges as well as further citation earliest and oldest of published works.