
Análisis e implementación de diferencial GPS en configuración simple y doble
Barra lateral del artículo
Contenido principal del artículo
Resumen
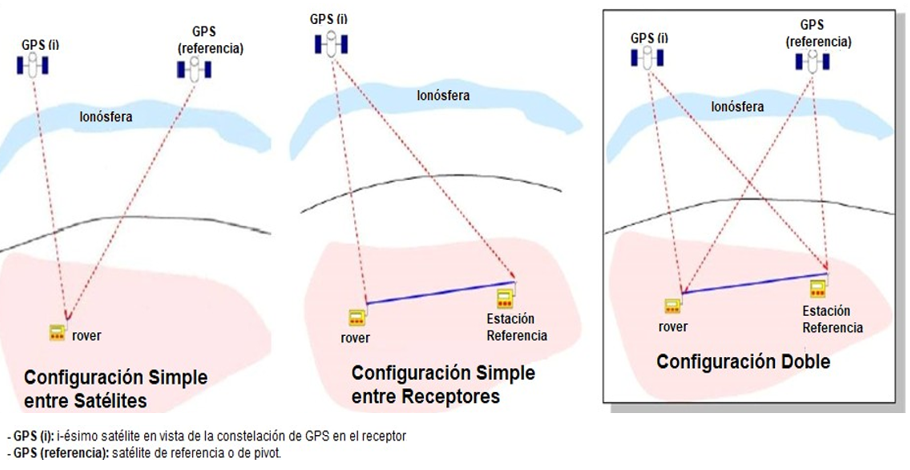
El servicio de posicionamiento estándar (SPS), o medidas sin diferenciar, contiene errores en sus medidas que perturban en la solución final de posicionamiento del receptor. A través de la aplicación de técnicas de diferenciación de GPS en configuración simple (SD) y doble (DD) es posible la eliminación de errores que afectan a la señal de GPS en el trayecto de propagación, se considera los más críticos a los errores producidos por la atmósfera y tropósfera. Entre el receptor de referencia y el dispositivo receptor GPS móvil (rover) existen errores correlacionados en tiempo y espacio de acuerdo a la distancia que exista entre éstos. La eliminación de errores correlacionados incrementa la precisión en la solución final. Se diseña la aplicación denominada DGPS-Lab creada para ejecutar el proceso de diferenciación en ambas configuraciones y verificar los resultados al minimizar los errores en el posicionamiento a través del algoritmo de DGPS implementado.
##plugins.themes.bootstrap3.displayStats.downloads##
Detalles del artículo
Número
Sección

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.