
Diseño e implementación de un sistema de control para el robot móvil P3-AT por medio de gestos manuales
Barra lateral del artículo
Publicado:
Dec 1, 2015
Palabras clave:
Kinect, simulador
Contenido principal del artículo
Resumen
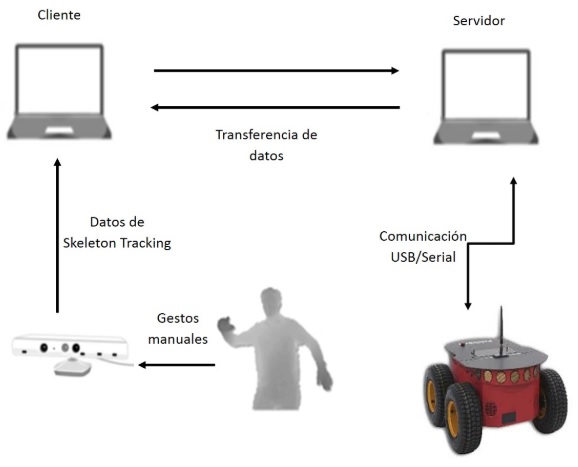
Este documento detalla como se construyó una relación entre un usuario y un robot móvil a través de una red cliente servidor inalámbrica utilizando el sensor Kinect para la respectiva adquisición de datos. El robot se mueve con los gestos indicados por la persona, ya sea que se necesite explorar o simplemente trasladar el robot. El usuario debe desarrollar la destreza para manipular el robot siguiendo el manual de usuario e iniciar con el simulador, así con este procedimiento se evita tener errores desde la conexión con el robot hasta la ejecución de los comportamientos. Los comportamientos se ejecutan con botones en la interfaz del cliente, y cada uno de forma exclusiva.
##plugins.themes.bootstrap3.displayStats.downloads##
##plugins.themes.bootstrap3.displayStats.noStats##
Detalles del artículo
Cómo citar
Diseño e implementación de un sistema de control para el robot móvil P3-AT por medio de gestos manuales. (2015). MASKAY, 5(1), 17-22. https://doi.org/10.24133/maskay.v5i1.121
Número
Sección
ARTÍCULOS TÉCNICOS

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Diseño e implementación de un sistema de control para el robot móvil P3-AT por medio de gestos manuales. (2015). MASKAY, 5(1), 17-22. https://doi.org/10.24133/maskay.v5i1.121
Referencias
[1] Abhijit Jana, Kinect for Windows SDK Programming Guide. Birmingham, U.K.: Packt Publishing Ltd, 2012.
[2] John MacCormick. (2015) How does the Kinect work? [En línea]. http://www.cs.bham.ac.uk/~vvk201/Teach/Graphics/kinect.pdf
[3] Gabriela Andaluz, "Modelación Identificación y Control de Robots Móviles," Escuela Politecnica Nacional, Quito, Tesis de Ingeniería en Electrónica y Control 2011.
[4] Aníbal Ollero, ROBÓTICA Manipuladores y robots móviles. Barcelona, España: Marcombo, 2001.
[5] Lukas Häfele. (2012, Marzo) Gesture Control. [En línea]. http://www.gesture-control.com.eu/
[6] MobileRobots Inc., Pioneer 3 Operations Manual with MobileRobots Exclusive Advanced Robot Control & Operations Software, 2006.
[7] Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, and Mark Finocchio. (2011) Real-Time Human Pose Recognition in Parts from Single Depth. [En línea]. http://research.microsoft.com/pubs/145347/BodyPartRecognition.pdf
[8] Jarrett Webb and James Ashley, Beginning Kinect Programming with the Microsoft Kinect SDK. Nueva York, N. Y.: Apress, 2012.
[2] John MacCormick. (2015) How does the Kinect work? [En línea]. http://www.cs.bham.ac.uk/~vvk201/Teach/Graphics/kinect.pdf
[3] Gabriela Andaluz, "Modelación Identificación y Control de Robots Móviles," Escuela Politecnica Nacional, Quito, Tesis de Ingeniería en Electrónica y Control 2011.
[4] Aníbal Ollero, ROBÓTICA Manipuladores y robots móviles. Barcelona, España: Marcombo, 2001.
[5] Lukas Häfele. (2012, Marzo) Gesture Control. [En línea]. http://www.gesture-control.com.eu/
[6] MobileRobots Inc., Pioneer 3 Operations Manual with MobileRobots Exclusive Advanced Robot Control & Operations Software, 2006.
[7] Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, and Mark Finocchio. (2011) Real-Time Human Pose Recognition in Parts from Single Depth. [En línea]. http://research.microsoft.com/pubs/145347/BodyPartRecognition.pdf
[8] Jarrett Webb and James Ashley, Beginning Kinect Programming with the Microsoft Kinect SDK. Nueva York, N. Y.: Apress, 2012.