
Modelamiento y simulación de un quadrotor mediante la integración de Simulink y SolidWorks
Barra lateral del artículo
Publicado:
Dec 28, 2018
Palabras clave:
Quadrotor, Simulink, Solidworks, modelo matemático, estabilidad
Contenido principal del artículo
Resumen
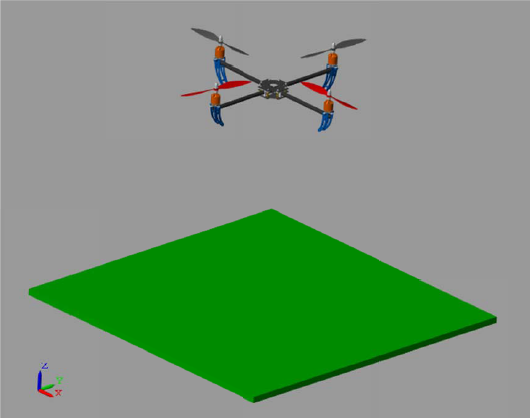
El propósito de este trabajo fue el de realizar el modelo dinámico de un vehículo aéreo no tripulado (VANT) tipo quadrotor, que simule el comportamiento real del mismo, de tal manera que el quadrotor pueda realizar sus movimientos básicos con el mínimo error posible. Para realizar dicho modelo matemático se consideró al quadrotor como un cuerpo rígido de seis grados de libertad en donde el sistema es dividido en coordenadas traslacionales y rotacionales al manejar una técnica para la modelación, mediante las ecuaciones de Euler-Lagrange, y así obtener la función de transferencia, expresada en las plantas del modelo dinámico que describe el comportamiento del quadrotor. La dinámica rotacional del VANT fue definida por los principales momentos de inercia, los cuales fueron hallados en el centro de masa del vehículo, dichos momentos fueron estimados a través del software de entorno CAD Solidworks. Para ello, el quadrotor se ensambló allí con el mínimo de partes posibles y luego el diseño se exportó a Simulink para complementar los resultados de la simulación con una animación en 3D del movimiento. Al diseño de la estructura se le implementó una estrategia de control que estabiliza las plantas ya descritas y se corroboró el funcionamiento del sistema al aplicar al mismo, perturbaciones externas como lo son las ráfagas de viento y masas variables que puedan producir inestabilidad durante el vuelo, logrando que ante este tipo de señales el sistema reaccione de forma controlada. En los resultados se observó que la simulación de una ráfaga de viento en donde el VANT cambio su posición en los ejes de desplazamiento horizontal, este mismo logró llegar nuevamente a su posición de referencia en menos de doce (12) segundos. Lo anterior constituye una importante aplicación de la dinámica rotacional del Vehículo Aéreo No Tripulado, al utilizar Simulink y la librería Simscape Multibody en conjunto con Solidworks, lográndose una herramienta de gran interés y por ende un aporte significativo para el estudio de los VANT, dando posibilidad del uso de una herramienta práctica para el diseño de quadrotores, enfocados en diferentes aplicaciones, tales como la agricultura de precisión.
##plugins.themes.bootstrap3.displayStats.downloads##
##plugins.themes.bootstrap3.displayStats.noStats##
Detalles del artículo
Cómo citar
Modelamiento y simulación de un quadrotor mediante la integración de Simulink y SolidWorks. (2018). MASKAY, 9(1), 15-24. https://doi.org/10.24133/maskay.v9i1.1043
Número
Sección
ARTÍCULOS TÉCNICOS

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Modelamiento y simulación de un quadrotor mediante la integración de Simulink y SolidWorks. (2018). MASKAY, 9(1), 15-24. https://doi.org/10.24133/maskay.v9i1.1043
Referencias
[1] D. Melero Cazorla, “Modelado dinámico y diseño de estrategia de control mediante estimadores para el vuelo autónomo de un quadrotor.,” Universitas Akmeriensis In Lumine Sapientia, 2012.
[2] A. Rincón, V., Molina, A., Torres-León, J.L. y Herazo, “Perspectivas de la tecnología VANT en el cultivo de palma de aceite: monitorización del cultivo mediante imágenes aéreas de alta resolución,” Palmas, vol. 36, no. 3, pp. 25–41, 2015.
[3] P. Castillo, P. García, R. Lozano, and P. Albertos, “Modelado y estabilización de un helicóptero con cuatro rotores,” Rev. Iberoam. Automática e Informática Ind. RIAI, vol. 4, no. 1, pp. 41–57, 2007.
[4] G. De la Cal Mendoza, “Modelado, simulación, construcción y control de un Quadcopter,” Universitat Politècnica de Catalunya, 2014.
[5] V. G. O. Padilla and P. R. P. Arévalo, “Diseño y construcción de un cuadricóptero a control remoto,” Univ. las Fuerzas Armadas ESPE, Carrera Ing. Mecatrónica, p. 12, 2012.
[6] M. Nguyen Duc, T. N. Trong, and Y. S. Xuan, “The quadrotor MAV system using PID control,” 2015 IEEE Int. Conf. Mechatronics Autom. ICMA 2015, pp. 506–510, 2015.
[7] L. M. Ariza Paez, “Modelado matemático de la dinámica de un quadroptero usando Matlab,” Unidades Tecnológicas de Santander, 2013.
[8] G. V. Raffo, “Modelado y control de un helicóptero quadrotor,” Universidad de Sevilla, 2007.
[9] T. Luukkonen, “Modelling and Ccontrol of Quadcopter,” J. Am. Soc. Mass Spectrom., vol. 22, no. 7, pp. 1134–45, 2011.
[10] A. Barrientos, L. F. Peñin, C. Balaguer, and R. Aracil, Fundamentos de Robotica.pdf, Segunda. Madrid, 1996.
[11] P. E. Garrigós, M. S. Maestro, and I. Z. López, Mecánica Clásica. Mdrid: Uned, 2016.
[12] J. J. Craig, Robótica, Tercera ed., vol. 1, no. 8020. Mexico: PEARSON, 2006.
[13] Y. Naidoo, R. Stopforth, and G. Bright, “Quad-Rotor Unmanned Aerial Vehicle Helicopter Modelling & Control Regular Paper,” vol. 8, pp. 139–149, 2011.
[14] T. Bresciani, “Modelling , Identification and Control of a Quadrotor Helicopter,” vol. 4, no. October, p. 213, 2008.
[15] Q. Quan, Introduction to Multicopter Design and Control. Beijing: Springer, 2017.
[16] H. C. T. E. Fernando, A. T. A. De Silva, M. D. C. De Zoysa, K. A. D. C. Dilshan, and S. R. Munasinghe, “Modelling, simulation and implementation of a quadrotor UAV,” 2013 IEEE 8th Int. Conf. Ind. Inf. Syst. ICIIS 2013 - Conf. Proc., pp. 207–212, 2013.
[17] M. Reinoso, L. I. Minchala, J. P. Ortiz, D. Astudillo, and D. Verdugo, “Trajectory Tracking of a Quadrotor Using Sliding Mode Control,” vol. 14, no. 5, pp. 2157–2166, 2016.
[18] R. A. García, F. R. Rubio, and M. G. Ortega, “Robust PID Control of the Quadrotor Helicopter,” IFAC Proc., vol. 45, no. 3, pp. 229–234, 2012.
[2] A. Rincón, V., Molina, A., Torres-León, J.L. y Herazo, “Perspectivas de la tecnología VANT en el cultivo de palma de aceite: monitorización del cultivo mediante imágenes aéreas de alta resolución,” Palmas, vol. 36, no. 3, pp. 25–41, 2015.
[3] P. Castillo, P. García, R. Lozano, and P. Albertos, “Modelado y estabilización de un helicóptero con cuatro rotores,” Rev. Iberoam. Automática e Informática Ind. RIAI, vol. 4, no. 1, pp. 41–57, 2007.
[4] G. De la Cal Mendoza, “Modelado, simulación, construcción y control de un Quadcopter,” Universitat Politècnica de Catalunya, 2014.
[5] V. G. O. Padilla and P. R. P. Arévalo, “Diseño y construcción de un cuadricóptero a control remoto,” Univ. las Fuerzas Armadas ESPE, Carrera Ing. Mecatrónica, p. 12, 2012.
[6] M. Nguyen Duc, T. N. Trong, and Y. S. Xuan, “The quadrotor MAV system using PID control,” 2015 IEEE Int. Conf. Mechatronics Autom. ICMA 2015, pp. 506–510, 2015.
[7] L. M. Ariza Paez, “Modelado matemático de la dinámica de un quadroptero usando Matlab,” Unidades Tecnológicas de Santander, 2013.
[8] G. V. Raffo, “Modelado y control de un helicóptero quadrotor,” Universidad de Sevilla, 2007.
[9] T. Luukkonen, “Modelling and Ccontrol of Quadcopter,” J. Am. Soc. Mass Spectrom., vol. 22, no. 7, pp. 1134–45, 2011.
[10] A. Barrientos, L. F. Peñin, C. Balaguer, and R. Aracil, Fundamentos de Robotica.pdf, Segunda. Madrid, 1996.
[11] P. E. Garrigós, M. S. Maestro, and I. Z. López, Mecánica Clásica. Mdrid: Uned, 2016.
[12] J. J. Craig, Robótica, Tercera ed., vol. 1, no. 8020. Mexico: PEARSON, 2006.
[13] Y. Naidoo, R. Stopforth, and G. Bright, “Quad-Rotor Unmanned Aerial Vehicle Helicopter Modelling & Control Regular Paper,” vol. 8, pp. 139–149, 2011.
[14] T. Bresciani, “Modelling , Identification and Control of a Quadrotor Helicopter,” vol. 4, no. October, p. 213, 2008.
[15] Q. Quan, Introduction to Multicopter Design and Control. Beijing: Springer, 2017.
[16] H. C. T. E. Fernando, A. T. A. De Silva, M. D. C. De Zoysa, K. A. D. C. Dilshan, and S. R. Munasinghe, “Modelling, simulation and implementation of a quadrotor UAV,” 2013 IEEE 8th Int. Conf. Ind. Inf. Syst. ICIIS 2013 - Conf. Proc., pp. 207–212, 2013.
[17] M. Reinoso, L. I. Minchala, J. P. Ortiz, D. Astudillo, and D. Verdugo, “Trajectory Tracking of a Quadrotor Using Sliding Mode Control,” vol. 14, no. 5, pp. 2157–2166, 2016.
[18] R. A. García, F. R. Rubio, and M. G. Ortega, “Robust PID Control of the Quadrotor Helicopter,” IFAC Proc., vol. 45, no. 3, pp. 229–234, 2012.