
On networked control systems under time, measurement, and process uncertainties
Article Sidebar
Main Article Content
Abstract
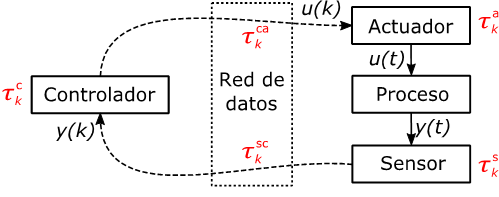
The performance of control loops closed over communication networks can deteriorate due to variable time delays caused by network congestion and latency and by the processing of the control algorithms, an effect known in periodic sampling as jitter. To remove this detrimental effect on stability/performance, the method of synchronization at actuation instants uses an observer to estimate the value of the states at actuation, knowing state measurements at sampling, which entails strictly periodic actuation. However, its successful application requires noise-free samples and undisturbed process issues are impossible. In this work, the model mentioned above is extended to the case of other non-ideal operating conditions. In particular, a Kalman filter is incorporated into the synchronized actuation model, considering that the available measurements of the states are not periodic. This raises the problem of adapting the standard discrete-time Kalman filter to the case under study and deciding when to apply the prediction and correction phases. The immediate benefit is that synchronized actuation eliminates the harmful effects of uncertainty over time, and the Kalman filter improves performance in the face of uncertainty in measurements and the process.
Downloads
Article Details
Section

This work is licensed under a Creative Commons Attribution 4.0 International License.
Authors who publish in this journal agree to the following terms: Authors retain the copyright and guarantee the journal the right to be the first publication of the work, as well as, licensed under a Creative Commons Attribution License that allows others share the work with an acknowledgment of the authorship of the work and the initial publication in this journal. Authors may separately establish additional agreements for the non-exclusive distribution of the version of the work published in the journal (for example, placing it in an institutional repository or publishing it in a book), with acknowledgment of its initial publication in this journal. Authors are allowed and encouraged to disseminate their work electronically (for example, in institutional repositories or on their own website) before and during the submission process, as it may lead to productive exchanges as well as further citation earliest and oldest of published works.