
Mejoramiento del desempeño del control auto-disparado inspirado en muestreo óptimo en la fase de implementación
Barra lateral del artículo
Contenido principal del artículo
Resumen
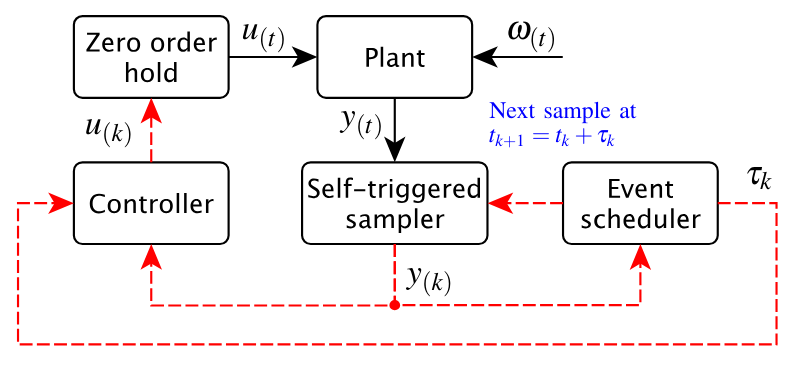
El control autodisparado incluye una estrategia de muestreo que se enfoca en disminuir el uso de recursos computacionales (procesador y red) preservando al mismo tiempo el mismo desempeño de control que el obtenido a través de un controlador con muestreo periódico. Este marco desarrolló recientemente una técnica de control autoactivada inspirada en un patrón de muestreo cuya densidad óptima minimiza el costo de control. Este enfoque se denomina “control autoactivado inspirado en el muestreo óptimo”. Sin embargo, las estrategias utilizadas para implementarlo en sistemas controlados por microprocesadores que funcionan bajo perturbación aún no están claras; Este artículo aborda algunas técnicas para organizar y mejorar la implementación en controladores reales. La solución propuesta comprende la formulación de dos algoritmos para organizar la implementación y la inserción de un observador de bucle cerrado para hacer frente a la perturbación que suele aparecer en las plantas naturales. Respecto al primero, los procesos computacionalmente costosos específicos involucrados en la implementación de esta técnica de control se tratan mediante su reemplazo por polinomios livianos ajustados en la etapa de diseño. Las simulaciones y los experimentos prácticos confirman que la solución es eficaz y podría haber un tema de investigación abierto sobre la observación de estrategias de control autoactivadas con muestreo óptimo.
##plugins.themes.bootstrap3.displayStats.downloads##
Detalles del artículo
Número
Sección

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.