
Controlador con observador de estados de orden completo para un motor de DC mediante dSPACE
Barra lateral del artículo
Publicado:
Oct 17, 2017
Palabras clave:
Controlador con realimentación de estados, SVF, control proporcional integral, observador de estados, motor de DC
Contenido principal del artículo
Resumen
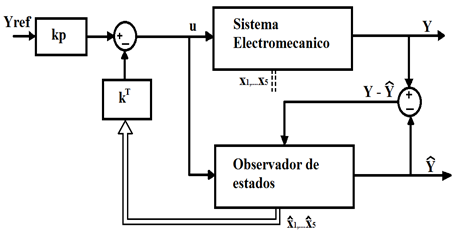
En este artículo se presenta el diseño, simulación e implementación de dos controladores con observadores de estado para un motor de DC con dos masas. El primer controlador es un controlador con realimentación de estados y el segundo es un controlador proporcional integral con realimentación de estados. El diseño y la simulación se la realiza en Matlab y la implementación se la realiza utilizando el módulo controlador dSPACE DS1104. El módulo dSPCE se programa mediante los bloques de Simulink utilizando el generador de código C, Real-Time Workshop de Matlab. El sistema electromecánico tiene cinco variables de estado, de las cuales se controla la posición angular del motor utilizando observadores de estado de orden completo. Se realiza una comparación del desempeño de los dos controladores implementados considerando sobre impulso, error en estado estable y tiempo de establecimiento de la respuesta a la función escalón. El controlador proporcional integral tiene la ventaja de tener menor error en estado estable, mientras que el controlador sin control proporcional integral tiene un tiempo de establecimiento menor.
##plugins.themes.bootstrap3.displayStats.downloads##
##plugins.themes.bootstrap3.displayStats.noStats##
Detalles del artículo
Cómo citar
Controlador con observador de estados de orden completo para un motor de DC mediante dSPACE. (2017). MASKAY, 7(1), 6-14. https://doi.org/10.24133/maskay.v7i1.347
Número
Sección
ARTÍCULOS TÉCNICOS

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Controlador con observador de estados de orden completo para un motor de DC mediante dSPACE. (2017). MASKAY, 7(1), 6-14. https://doi.org/10.24133/maskay.v7i1.347
Referencias
[1] U. Manwong, S. Boonpiyathud, y S. Tunyasrirut, “Implementation of a dSPACE DSP-based state feedback with state observer using Matlab/Simulink for a speed control of DC motor system,” in 2008 International Conference on Control, Automation and Systems, Seoul, South Korea, Oct. 2008, pp. 2433-2436.
[2] R. Salas-Cabrera, J. D. León-Morales, J. C. Mayo-Maldonado, J. C. Rosas-Caro, E. N. Salas-Cabrera, y C. A. Reyna-López, “Observer Design for DC Electric Machines,” in 2009 Second International Conference on Computer and Electrical Engineering, Dubai, United Arab Emirates, Dec. 2009, pp. 90-94.
[3] G. Fabri, C. Olivieri, y M. Tursini, “Observer-based sensorless control of a five-phase brushless DC motor,” in The XIX International Conference on Electrical Machines - ICEM 2010, Rome, Italy, Sep. 2010, pp. 1-6.
[4] K. Meah, S. Hietpas, y S. Ula, “Rapid Control Prototyping of a Permanent Magnet DC Motor Drive System using dSPACE and Mathworks Simulink,” in APEC 07 - Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, Mar. 2007, pp. 856-861.
[5] P. Hippe y J. Deutscher, Design of Observer-based Compensators: From the Time to the Frequency Domain. London, UK: Springer London, 2009.
[6] A. Palacios, “Modeling, Identification and Controller Design of an Electrical Servo System with a Two-Mass Characteristic,”, M.S. thesis, University of Applied Science Esslingen, Germany, 2010.
[7] H. Lutz y W. Wendt, Taschenbuch der Regelungstechnik: mit MATLAB und Simulink. Europa Lehrmittel Verlag, 2007.
[8] K. Ogata, Modern Control Engineering. Prentice Hall, 2010.
[9] R. L. W. II y D. A. Lawrence, Linear State-Space Control Systems. John Wiley & Sons, 2007.
[10] H. P. Geering, Regelungstechnik: Mathematische Grundlagen, Entwurfsmethoden, Beispiele. Springer-Verlag, 2013.
[2] R. Salas-Cabrera, J. D. León-Morales, J. C. Mayo-Maldonado, J. C. Rosas-Caro, E. N. Salas-Cabrera, y C. A. Reyna-López, “Observer Design for DC Electric Machines,” in 2009 Second International Conference on Computer and Electrical Engineering, Dubai, United Arab Emirates, Dec. 2009, pp. 90-94.
[3] G. Fabri, C. Olivieri, y M. Tursini, “Observer-based sensorless control of a five-phase brushless DC motor,” in The XIX International Conference on Electrical Machines - ICEM 2010, Rome, Italy, Sep. 2010, pp. 1-6.
[4] K. Meah, S. Hietpas, y S. Ula, “Rapid Control Prototyping of a Permanent Magnet DC Motor Drive System using dSPACE and Mathworks Simulink,” in APEC 07 - Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, Mar. 2007, pp. 856-861.
[5] P. Hippe y J. Deutscher, Design of Observer-based Compensators: From the Time to the Frequency Domain. London, UK: Springer London, 2009.
[6] A. Palacios, “Modeling, Identification and Controller Design of an Electrical Servo System with a Two-Mass Characteristic,”, M.S. thesis, University of Applied Science Esslingen, Germany, 2010.
[7] H. Lutz y W. Wendt, Taschenbuch der Regelungstechnik: mit MATLAB und Simulink. Europa Lehrmittel Verlag, 2007.
[8] K. Ogata, Modern Control Engineering. Prentice Hall, 2010.
[9] R. L. W. II y D. A. Lawrence, Linear State-Space Control Systems. John Wiley & Sons, 2007.
[10] H. P. Geering, Regelungstechnik: Mathematische Grundlagen, Entwurfsmethoden, Beispiele. Springer-Verlag, 2013.