
Mapas de entornos mediante navegacion difusa y sistema de teleoperacion de una plataforma Pioneer P3-DX
Barra lateral del artículo
Publicado:
Nov 1, 2013
Palabras clave:
Robótica, ARIA, OpenCV, Python, GNU/Linux, Lógica difusa
Contenido principal del artículo
Resumen
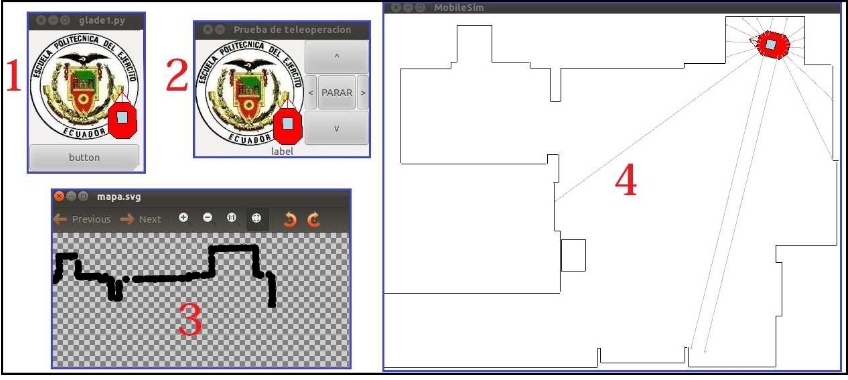
El presente proyecto describe el diseño e implementación de aplicaciones de Teleoperación, Adquisición de Datos, Control Difuso de Velocidad y Mapeo de Entornos en 2D, para la plataforma móvil Pioneer P3-DX mediante el uso de sonares, odometría y software libre GNU/Linux. El proyecto brinda una guía para utilizar los conceptos de programación en Python, que permite crear aplicaciones de manera versátil mediante el uso de librerías como: GTK para el desarrollo del entorno gráfico, PYFUZZY para el desarrollo del controlador difuso de velocidad y OPENCV para mostrar los mapas del entorno.
##plugins.themes.bootstrap3.displayStats.downloads##
##plugins.themes.bootstrap3.displayStats.noStats##
Detalles del artículo
Cómo citar
Mapas de entornos mediante navegacion difusa y sistema de teleoperacion de una plataforma Pioneer P3-DX. (2013). MASKAY, 3(1), 1-11. https://doi.org/10.24133/maskay.v3i1.117
Número
Sección
ARTÍCULOS TÉCNICOS

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores que publican en esta revista están de acuerdo con los siguientes términos: Los autores conservan los derechos de autor y garantizan a la revista el derecho de ser la primera publicación del trabajo al igual que licenciado bajo una Creative Commons Attribution License que permite a otros compartir el trabajo con un reconocimiento de la autoría del trabajo y la publicación inicial en esta revista. Los autores pueden establecer por separado acuerdos adicionales para la distribución no exclusiva de la versión de la obra publicada en la revista (por ejemplo, situarlo en un repositorio institucional o publicarlo en un libro), con un reconocimiento de su publicación inicial en esta revista. Se permite y se anima a los autores a difundir sus trabajos electrónicamente (por ejemplo, en repositorios institucionales o en su propio sitio web) antes y durante el proceso de envío, ya que puede dar lugar a intercambios productivos, así como a una citación más temprana y mayor de los trabajos publicados.Cómo citar
Mapas de entornos mediante navegacion difusa y sistema de teleoperacion de una plataforma Pioneer P3-DX. (2013). MASKAY, 3(1), 1-11. https://doi.org/10.24133/maskay.v3i1.117
Referencias
[1] MOBILEROBOTS.INC, Pioneer3 Operations Manual, 75 pags, 2007.
[2] MORALES JIMENA, JARAMILLO DANIEL , Desarrollo de Aplicaciones y Documentación de las Plataformas Robóticas Pioneer P3-DX y Pioneer3 P3-AT, 265 p´ags, 2010.
[3] PASSINO KEVIN, Fuzzy Control, 522 pags, 1998.
[2] MORALES JIMENA, JARAMILLO DANIEL , Desarrollo de Aplicaciones y Documentación de las Plataformas Robóticas Pioneer P3-DX y Pioneer3 P3-AT, 265 p´ags, 2010.
[3] PASSINO KEVIN, Fuzzy Control, 522 pags, 1998.